Physikalische Wissenschaft
Am Februar 1, 2024 ver?ffentlichte ein Team um Akademiker Yang Guangzhong vom Medical Robotics Research Institute der Shanghai Jiao Tong Universit?t und Professor Tao Guangming von der Huazhong University of Science and Technology gemeinsam einen Ausblick-Artikel mit dem Titel "Flexible Faserlaserwaagen: Material and fabrication challenges" online in der Zeitschrift Matter of Cell Press Cell Press.
Der Beitrag geht auf die grundlegenden Arbeitsmechanismen und Einsatzm?glichkeiten von Laserchirurgischen Messern und Kontinuumsrobotertechnologie ein, diskutiert deren Forschungsfortschritt auf dem Gebiet der pr?zisionschirurgischen Medizin, und schl?gt die Vorteile und gro?en Herausforderungen flexibler Faserroboter-Laser-OP-Messer als potenzielle neue minimalinvasive chirurgische Verarbeitungstechnologie zur Verbesserung der Funktionalit?t und klinischen Anpassungsf?higkeit intelligenter medizinischer Roboter vor. Er sieht auch der künftigen Ausrichtung dieses Bereichs erwartungsvoll entgegen.
Die minimalinvasive Chirurgie hat einzigartige Vorteile wie Sicherheit, kleiner Schnitt und schnelle postoperative Erholung, die die Entwicklung der Pr?zisionschirurgie stark f?rdert. Mit der Entwicklung der modernen Medizin und Bioengineering haben sich chirurgische Messer von einzelnen Metallmessern zu Ultraschallmessern, hochfrequenten elektrischen Messern usw. entwickelt und die chirurgische Effizienz erheblich verbessert. In komplexen chirurgischen Szenarien haben chirurgische Messer jedoch Probleme wie gro?e Ger?tegr??e, starke Steifigkeit und unzureichende Man?vrierbarkeit, die die Wirksamkeit der chirurgischen Behandlung ernsthaft verringern. Das Aufkommen der laserchirurgischen Messertechnologie ist ein wichtiger Meilenstein im Bereich der Pr?zisionschirurgie und medizinischen Versorgung. Zahlreiche klinische Studien haben gezeigt, dass es signifikante Vorteile wie hohe Ablationsgenauigkeit und Effizienz, weniger Blutungen und minimale Seitensch?den hat. Es hat breite Anwendungsaussichten in der minimalinvasiven chirurgischen Gewebeverarbeitung. Die hohen Anforderungen an die mechanische und optische Leistungsf?higkeit von kleinskaligen flexiblen Laserenergietr?gern in der minimalinvasiven Chirurgie sowie die Grenzen der Integrationsmethode zwischen Transfermedien und medizinischen Robotern stellen jedoch gro?e Herausforderungen an die tiefgreifende Anwendung der Laserskalpelltechnologie in der minimalinvasiven Chirurgie dar.
Im Gegensatz zu herk?mmlichen chirurgischen Werkzeugen, die auf mechanischer Bearbeitung basieren, erzielen Laser-chirurgische Messer eine effiziente biologische Gewebebearbeitung durch ihre einzigartigen Gewebe-optischen Effekte. Der Artikel behandelt die Mechanismen der photothermischen Ablation und photomechanischen Ablation für Weich- und Hartgewebsresektion und diskutiert den Forschungsfortschritt der wasservermittelten und ultrakurzpulsigen Lasertechnologie zur Linderung thermischer Sch?den wie Gewebekondensation und Karbonisierung (Abbildung 1). Darüber hinaus analysiert der Artikel die Eigenschaften, Vorteile und Anwendungswert von medizinischen Infrarot-Lichtquellen, die haupts?chlich aus Nd-, Ho-, Tm-, Er- und CO2-Lasern in verschiedenen chirurgischen Bereichen wie Zahnmedizin und Urologie bestehen, und betont die erheblichen Herausforderungen, die der Fortschritt der neuen chirurgischen Laserlichtquellentechnologie zur Flexibilit?t, Stabilit?t bringt. und Steuerbarkeit von Laserübertragungsmedien.
Als Schlüsselkomponente im Laser-chirurgischen Messersystem muss das Laserübertragungsmedium die Laserenergie stabil an bestimmte Operationsstellen liefern. Der Artikel befasst sich systematisch mit dem Forschungsstatus der drei wichtigsten medizinischen Laserübertragungsmedien: Lichtleiterarm, Hohlwellenleiter und Infrarotfaser und betont die potenzielle Anwendung kleiner, hochflexibler Infrarotfaserger?te in der minimalinvasiven chirurgischen Medizin. Der Artikel analysiert umfassend den Forschungsfortschritt von Infrarot-Faseroptikger?ten, vergleicht die Ger?teleistung von Fasern im Er-Laser und CO2-Laser aus den Perspektiven der Laserübertragungsschwelle, des optischen Verlustes und der mechanischen Flexibilit?t (Abbildung 2), und weist darauf hin, dass hohe optische Verluste und geringe mechanische Festigkeit die Schlüsselfaktoren sind, die die tiefe Anwendung von Infrarot-Glasfaserger?ten in der Chirurgie einschr?nken. In den letzten Jahren hat die schnelle Entwicklung der Multimaterialfasertechnologie zur hochintegrierten Integration von Verbundwerkstoffen mit verschiedenen physikalischen Eigenschaften wie Licht, Kraft, Elektrizit?t und Magnetismus geführt. Bereitstellung zuverl?ssiger Forschungsunterstützung für die Entwicklung von optischen Fasern mit hoher Flexibilit?t und geringem Verlust im mittleren Infrarot und weitere Verbesserung der Funktionalit?t von chirurgischen Instrumenten.
Die pr?zise Steuerung chirurgischer Instrumente ist ein wichtiger Faktor für eine effiziente und minimalinvasive Chirurgie. Die rasante Entwicklung der Werkstoff- und Bioingenieurdisziplinen hat die Forschung an kontinuumschirurgischen Robotern mit unterschiedlichen Fahrmethoden zur F?rderung der Entwicklung der pr?zisionschirurgischen Medizin geführt. Der Beitrag analysiert umfassend den Antriebsmechanismus und die Eigenschaften bestehender Kontinuumsroboter (Abbildung 3),
Wir weisen auf das enorme Potenzial von Kontinuumsrobotern hin, die auf magnetischem Fahren für sichere, pr?zise und intelligente chirurgische Eingriffe basieren. Darüber hinaus schl?gt der Artikel das Konzept der flexiblen Faserroboter Laser Chirurgiemesser vor. Die Kombination von Laser-OP-Messern und medizinischen Kontinuumsrobotern hat ihre breiteren klinischen Anwendungen gef?rdert. Diese Systeme wurden erfolgreich in der Urologie, Gyn?kologie und HNO-Chirurgie eingesetzt.
Um sich an komplexere klinisch-physiologische Strukturen und chirurgische Umgebungen anzupassen, ist es notwendig, die Funktionalit?t chirurgischer Instrumente weiter zu verbessern. Der Beitrag konzentriert sich auf den Forschungsfortschritt medizinischer Roboter in der Positionierung, Bildgebung und Informationswahrnehmung und untersucht die Entwicklung, Eigenschaften und Anwendungspotenziale von Technologien wie Positionierungssystemen auf Basis von elektromagnetischen Tracking (EM) und Bragg-Gittersensoren (FBG), bildgebenden Systemen auf Basis von Ladungsgekoppelten Elementen (CCD/CMOS) und Faserbündeln, Krafterfassung, und Temperaturmessger?te. Darüber hinaus schl?gt der Artikel ein flexibles Faserroboter-Laser-OP-Messer vor, das auf einer Kontinuum-Roboterarchitektur basiert und Positionierungs-, Abbildungs- und Wahrnehmungsfunktionen integriert. Es besteht aus einem kontinuierlichen Roboterskelett und funktionalen Ger?ten. Seine Kernfunktionen sind Laserablation, Fahren und Informationserfassung, die durch Laserübertragungsmedien, Antriebsmodule und Sensoren im Roboterskelett erreicht werden (Abbildung 4).
Die innovative Entwicklung chirurgischer Instrumente ist ein wichtiger Faktor für den rasanten Fortschritt der pr?zisionschirurgischen Medizintechnik. Laserchirurgische Skalpelle entwickeln sich st?ndig in Richtung kleiner, hochflexibler und effizienter Richtungen und haben viele Durchbrüche im klinischen Bereich erzielt, indem sie tief in funktionale Ger?te wie Navigationssteuerung, Positionierung, Bildgebung und Informationswahrnehmung integriert sind, um die Bedürfnisse von engeren und komplexeren chirurgischen Umgebungen zu erfüllen. Am Ende des Artikels werden die Vorteile und gro?en Herausforderungen zukünftiger flexibler Faserroboter-Lasermesser in der Pr?zisionschirurgie zusammengefasst und die zukünftige Entwicklungsrichtung in diesem Bereich diskutiert (Abbildung 5): (1) Material, Struktur und Herstellung von Laserübertragungsmedien werden diskutiert. Durch die Innovation von biokompatiblen Hochleistungsmaterialien und die Entwicklung von Hochleistungswellenleiterstrukturen, kombiniert mit fortschrittlichen Faserherstellungsmethoden, wird eine stabile und effiziente Entwicklung flexibler Laserübertragungsmedien für die medizinische Laserleistung erreicht. (2) Das Fahren, Modellieren und Erfassen von medizinischen Robotern zielt darauf ab, den Antriebsmechanismus und das neue strukturelle Design von medizinischen Robotern in engen anatomischen R?umen zu erforschen und eine pr?zise und sichere chirurgische Diagnose und Operation zu erreichen. (3) Die Entwicklung von Multimaterialfaserger?ten stellt flexiblere und intelligentere chirurgische Werkzeuge für den klinischen Eingriff zur Verfügung. (4) Das Design und die Herstellung von Mikronanostrukturen an Faseroptikspitzen bereichern die multimodalen Operationsstrategien von Faserrobotern. (5) Die verteilte Erfassung auf der faseroptischen Seitenoberfl?che bietet Robotern die F?higkeit, lokale Umweltinformationen genau zu erhalten.
Zou Yuqi, Ren Zhihe, Xiang Yuanzhuo, Doktoranden der Huazhong University of Science and Technology, und Liu Chao, Masterstudenten der Huazhong University of Science and Technology, sind die Co-Erstautoren des Artikels. Der Akademiker Yang Guangzhong von der Shanghai Jiaotong Universit?t und Professor Tao Guangming von der Huazhong University of Science and Technology sind die Co-korrespondierenden Autoren des Artikels. Zu den Kooperationseinheiten geh?rt auch das Xi'an Institut für Optik und Feinmechanik der Chinesischen Akademie der Wissenschaften. Diese Arbeit wurde von Projekten wie dem National Key Research and Development Program, der National Natural Science Foundation of China und dem Cross Research Support Program der Huazhong University of Science and Technology unterstützt.
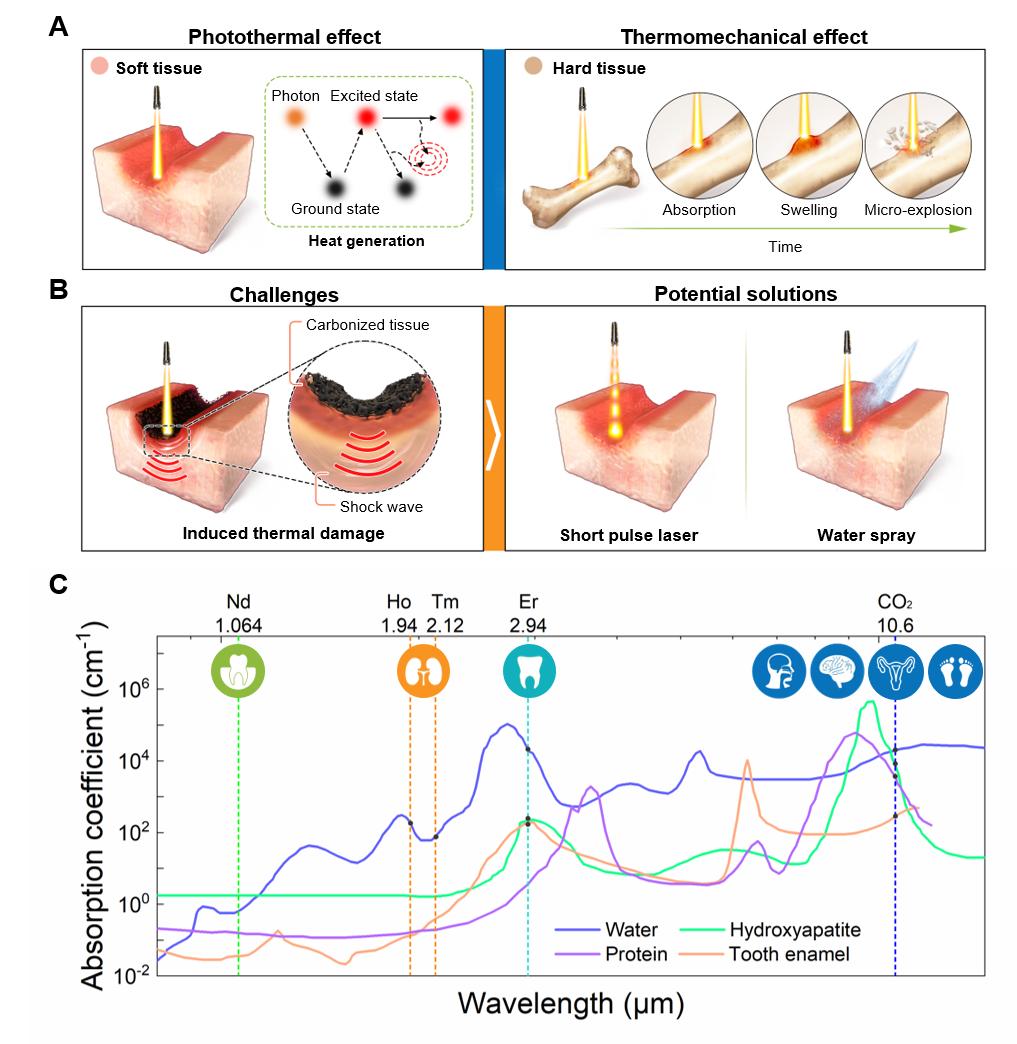
Abbildung 1: Laserablationsmechanismus und klinische Anwendung.
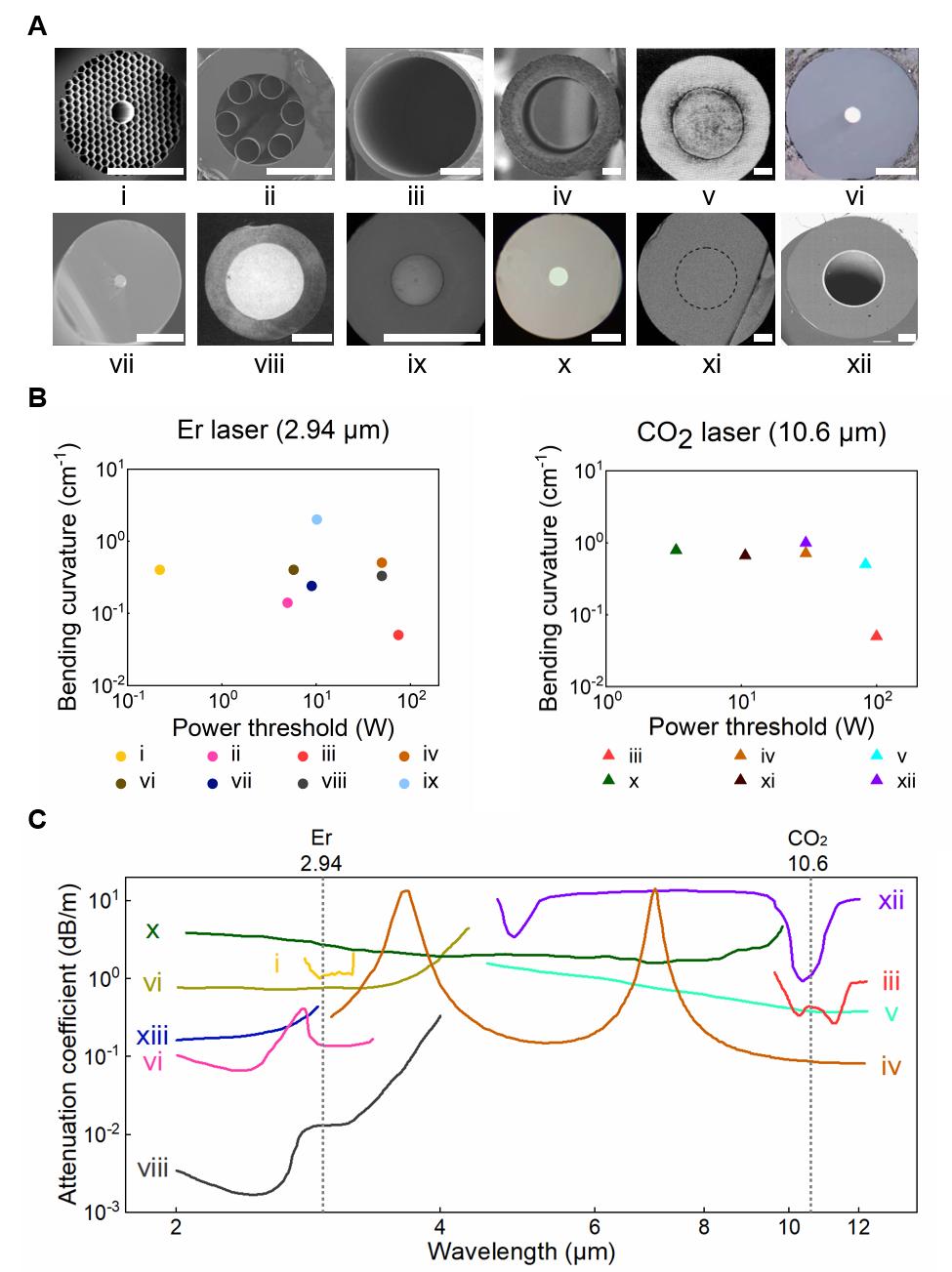
Abbildung 2 Typische mittelinfrarote Glasfaserger?te und ihr Leistungsvergleich.
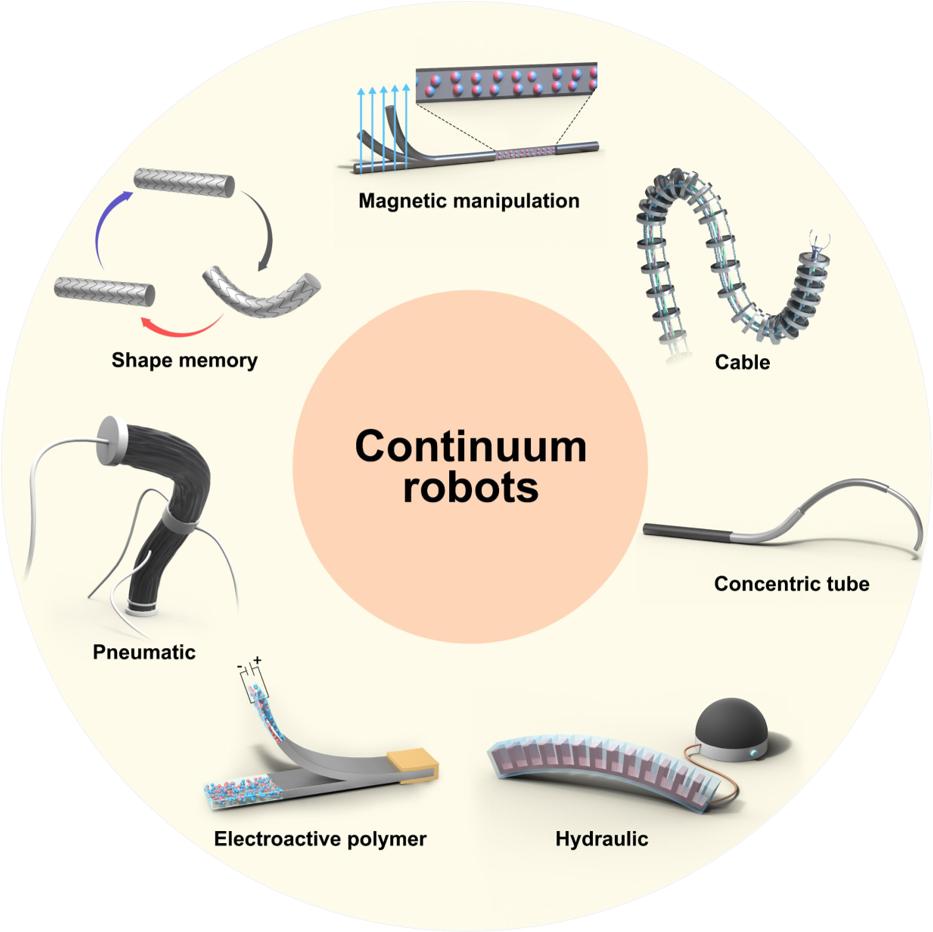
Abbildung 3 Fahrmethode des medizinischen Kontinuumsroboters.
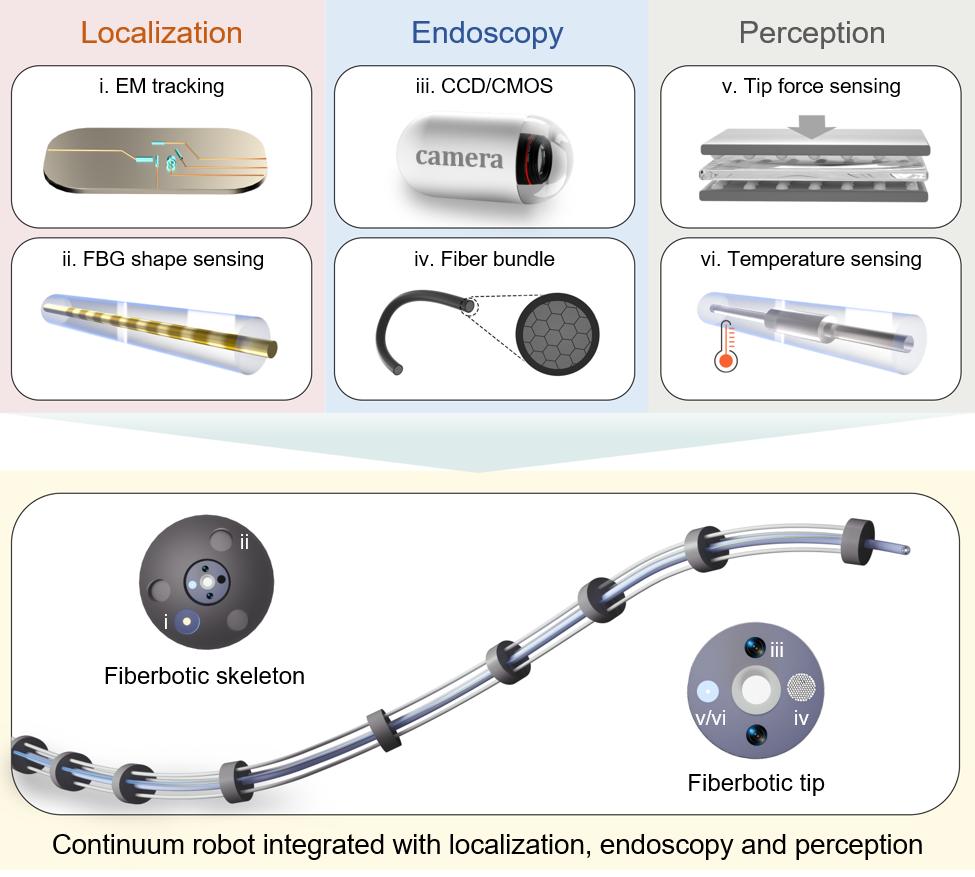
Abbildung 4: Ein multifunktionaler Kontinuumsroboter, der Lokalisierung, Bildgebung und Wahrnehmung erm?glicht.
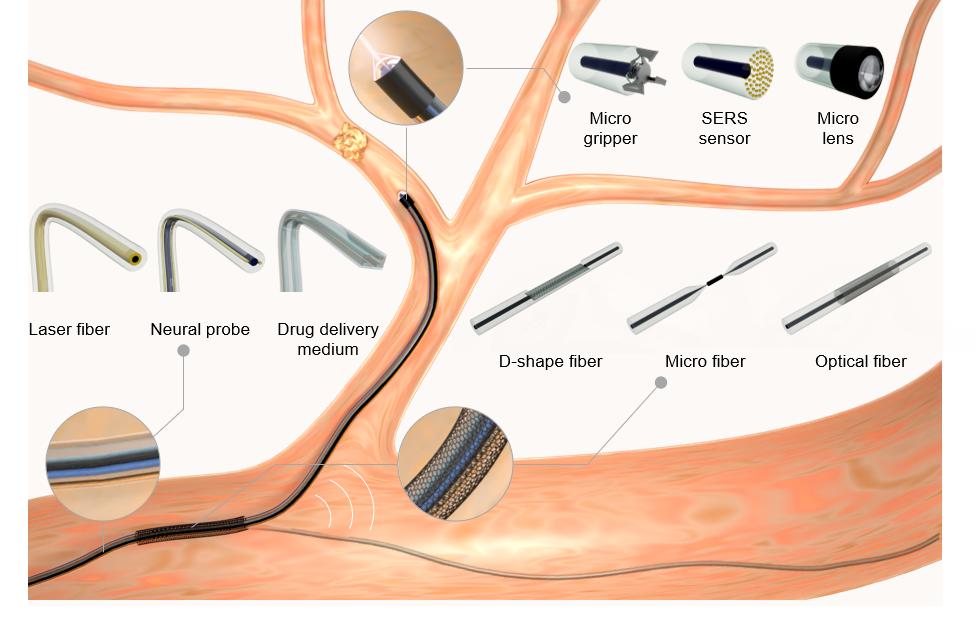
Abbildung 5: Zukünftiges flexibles Laser-chirurgisches Messer des Faserroboters.
