Physical science
On February 1, 2024, a team led by Academician Yang Guangzhong from the Medical Robotics Research Institute of Shanghai Jiao Tong University and Professor Tao Guangming from Huazhong University of Science and Technology jointly published an outlook article titled "Flexible fiber laser scales: material and fabrication challenges" online in the journal Matter of Cell Press Cell Press.
The article elaborates on the basic working mechanism and potential applications of laser surgical knives and continuum robot technology, discusses their research progress in the field of precision surgical medicine, and proposes the advantages and huge challenges of flexible fiber robot laser surgical knives as a potential new minimally invasive surgical processing technology in improving the functionality and clinical adaptability of intelligent medical robots. It also looks forward to the future direction of this field.
Minimally invasive surgery has unique advantages such as safety, small incision, and fast postoperative recovery, greatly promoting the development of precision surgical medicine. With the development of modern medicine and bioengineering, surgical knives have evolved from single metal knives to ultrasonic knives, radiofrequency electric knives, etc., greatly improving surgical efficiency. However, in complex surgical scenarios, surgical knives have problems such as large device scale, strong rigidity, and insufficient maneuverability, which seriously reduce the effectiveness of surgical treatment. The emergence of laser surgical knife technology is an important milestone in the field of precision surgery and medical care. Numerous clinical studies have shown that it has significant advantages such as high ablation accuracy and efficiency, less bleeding, and minimal side damage. It has broad application prospects in minimally invasive surgical tissue processing. However, the high requirements for the mechanical and optical performance of small-scale flexible laser energy transfer media in minimally invasive surgery, as well as the limitations of the integration method between the transfer media and medical robots, pose great challenges to the in-depth application of laser scalpel technology in minimally invasive surgery.
Unlike traditional surgical tools based on mechanical processing, laser surgical knives achieve efficient biological tissue processing through their unique tissue optical effects. The article elaborates on the mechanisms of photothermal ablation and photomechanical ablation for soft and hard tissue resection, and discusses the research progress of water mediated and ultra short pulse laser technology in alleviating thermal damage such as tissue condensation and carbonization (Figure 1). Furthermore, the article analyzes the characteristics, advantages, and application value of infrared medical light sources mainly composed of Nd, Ho, Tm, Er, and CO2 lasers in various surgical fields such as dentistry and urology, and emphasizes the significant challenges that the advancement of new surgical laser light source technology brings to the flexibility, stability, and controllability of laser transmission media.
As a key component in the laser surgical knife system, the laser transmission medium needs to stably deliver laser energy to specific surgical sites. The article systematically elaborates on the research status of three main medical laser transmission media: light guide arm, hollow waveguide, and infrared fiber, and emphasizes the potential application of small-scale, highly flexible infrared fiber devices in minimally invasive surgical medicine. The article comprehensively analyzes the research progress of infrared fiber optic devices, compares the device performance of fibers in Er laser and CO2 laser from the perspectives of laser transmission threshold, optical loss, and mechanical flexibility (Figure 2), and points out that high optical loss and low mechanical strength are the key factors limiting the deep application of infrared fiber optic devices in surgery. In recent years, the rapid development of multi material fiber technology has led to the highly integrated integration of composite materials with different physical properties such as light, force, electricity, and magnetism, providing reliable research support for the development of high flexibility and low loss mid infrared optical fibers and further improving the functionality of surgical instruments.
The precise control of surgical instruments is an important factor in achieving efficient and minimally invasive surgery. The rapid development of materials science and bioengineering disciplines has given rise to research on continuum surgical robots with diverse driving methods, promoting the development of precision surgical medicine. The article comprehensively analyzes the driving mechanism and characteristics of existing continuum robots (Figure 3), pointing out the enormous potential of continuum robots based on magnetic driving in safe, accurate, and intelligent surgical interventions. In addition, the article further proposes the concept of flexible fiber robot laser surgical knives. The combination of laser surgical knives and medical continuum robots has promoted their wider clinical applications. These systems have been successfully applied in urology, gynecology, and otolaryngology surgeries.
To adapt to more complex clinical physiological structures and surgical environments, it is necessary to further enhance the functionality of surgical instruments. The article focuses on the research progress of medical robots in positioning, imaging, and information perception, and explores the development, characteristics, and application potential of technologies such as positioning systems based on electromagnetic tracking (EM) and Bragg grating (FBG) sensors, imaging systems based on charge coupled elements (CCD/CMOS) and fiber bundles, force sensing, and temperature sensing feedback devices. In addition, the article proposes a flexible fiber robot laser surgical knife based on a continuum robot architecture, which integrates positioning, imaging, and perception functions. It is composed of a continuum robot skeleton and functional devices. Its core functions are laser ablation, driving, and information acquisition, which are achieved through laser transmission media, driving modules, and sensors embedded in the robot skeleton (Figure 4).
The innovative development of surgical instruments is an important factor driving the rapid progress of precision surgical medical technology. Laser surgical scalpels are constantly developing towards small-scale, highly flexible, and efficient directions, and have made many breakthroughs in the clinical field by deeply integrating with functional devices such as navigation control, positioning, imaging, and information perception to meet the needs of narrower and more complex surgical environments. At the end of the article, the advantages and huge challenges of future flexible fiber robot laser knives in precision surgical medicine are summarized, and the future development direction in this field is discussed (Figure 5): (1) The material, structure, and manufacturing of laser transmission media are discussed. By innovating high-performance biocompatible materials and designing high-performance waveguide structures, combined with advanced fiber manufacturing methods, stable and efficient development of flexible laser transmission media for medical laser output is achieved. (2) The driving, modeling, and sensing of medical robots aim to explore the driving mechanism and new structural design of medical robots in narrow anatomical spaces, achieving precise and safe surgical diagnosis and operation. (3) The development of multi material fiber devices provides more flexible and intelligent surgical tools for clinical intervention. (4) The design and manufacturing of micro nano structures at fiber optic tips enrich the multimodal operation strategies of fiber robots. (5) The distributed sensing on the fiber optic side surface provides robots with the ability to accurately obtain local environmental information.
Zou Yuqi, Ren Zhihe, Xiang Yuanzhuo, doctoral students of Huazhong University of Science and Technology, and Liu Chao, master students of Huazhong University of Science and Technology are the co first authors of the paper. Academician Yang Guangzhong of Shanghai Jiaotong University and Professor Tao Guangming of Huazhong University of Science and Technology are the co corresponding authors of the paper. The cooperation units also include Xi'an Institute of Optics and Precision Mechanics of the Chinese Academy of Sciences. This work has been supported by projects such as the National Key Research and Development Program, the National Natural Science Foundation of China, and the Cross Research Support Program of Huazhong University of Science and Technology.
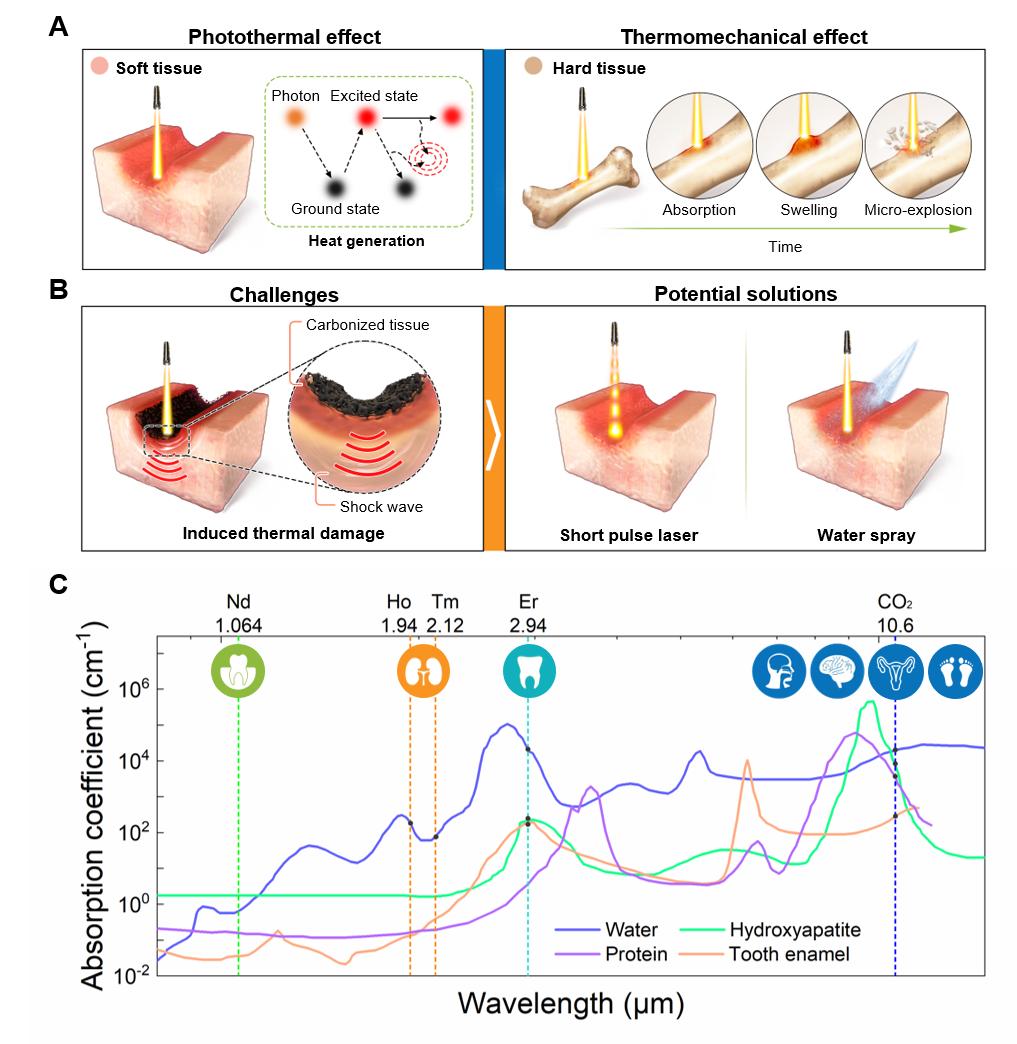
Figure 1: Laser ablation mechanism and clinical application.
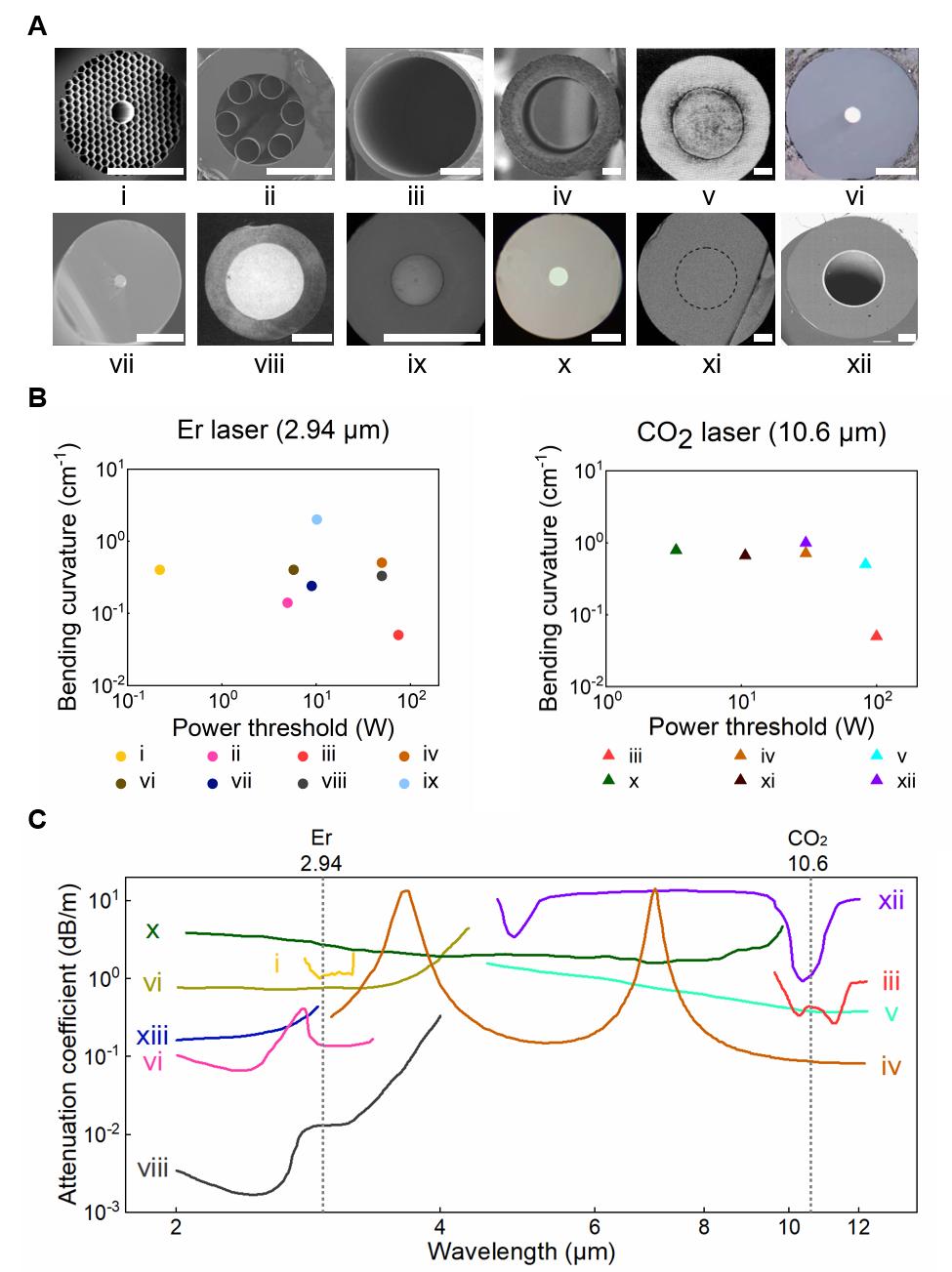
Figure 2 Typical mid infrared fiber optic devices and their performance comparison.
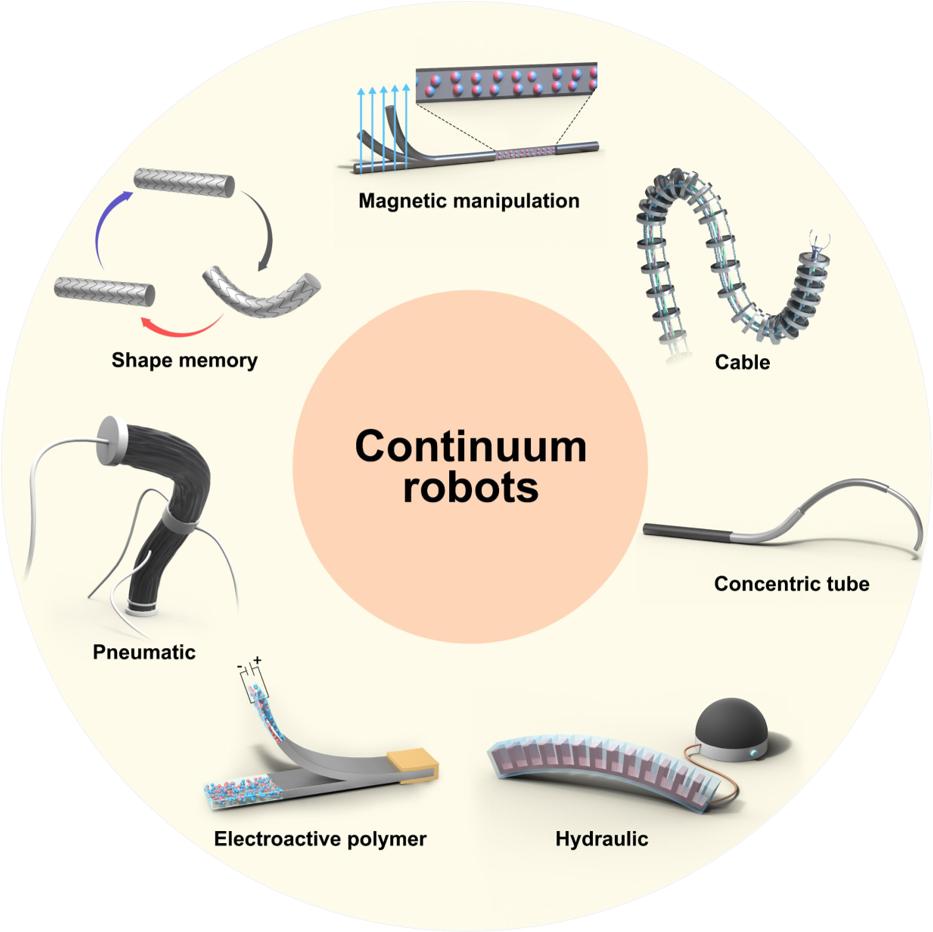
Figure 3 Driving method of medical continuum robot.
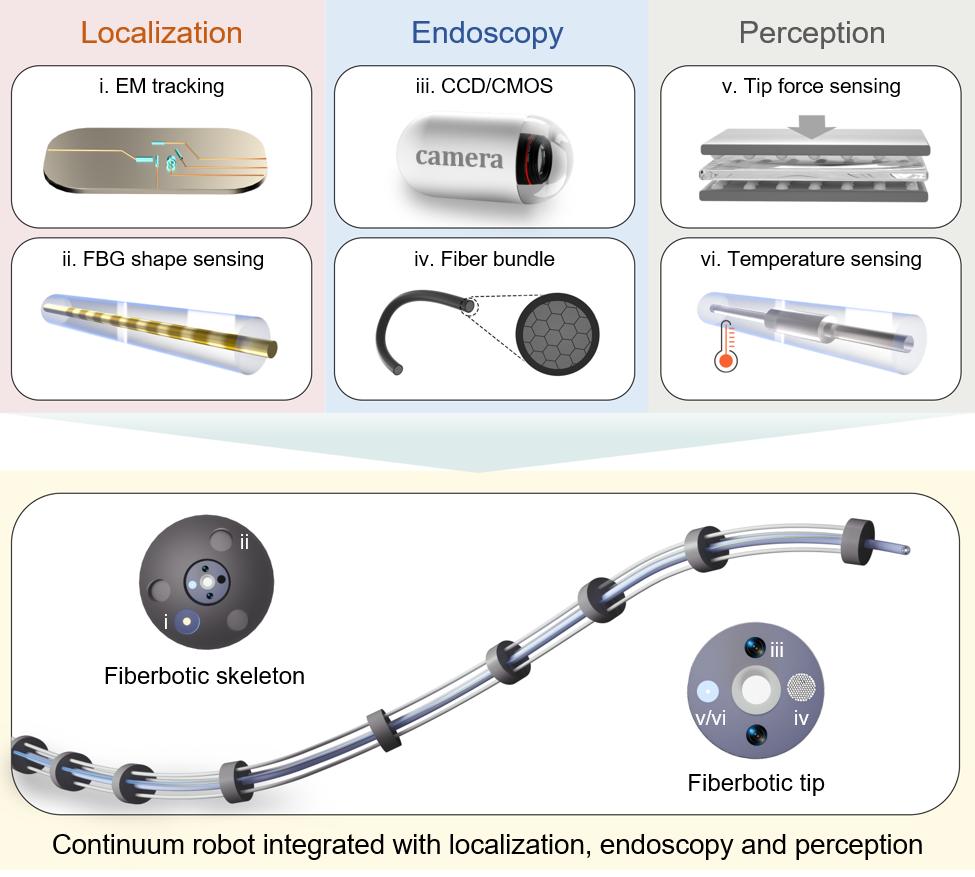
Figure 4: A multifunctional continuum robot capable of localization, imaging, and perception.
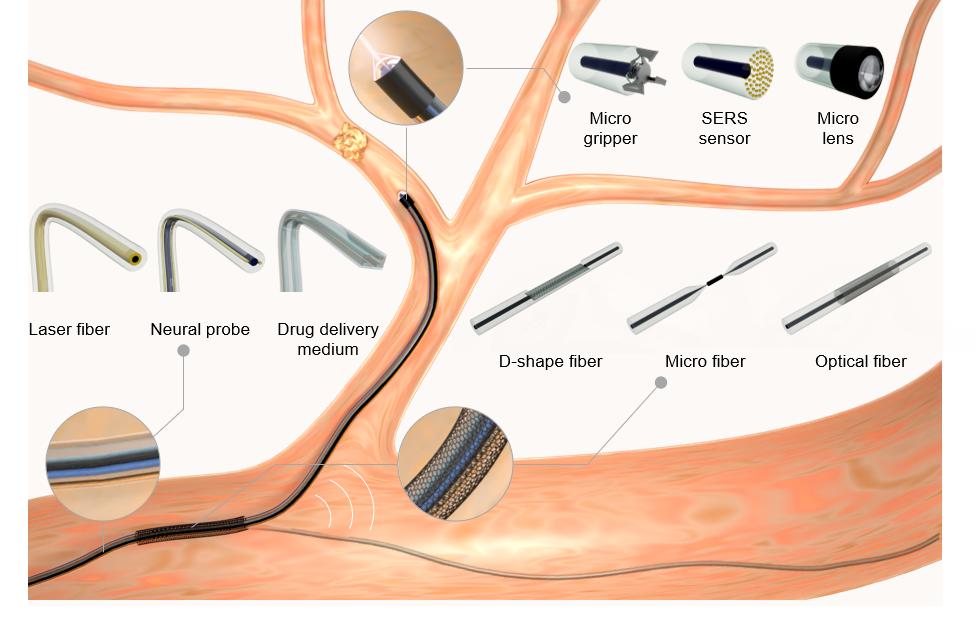
Figure 5: Future flexible fiber robot laser surgical knife.
